SCIENCE ROV와 AUV의 세계
페이지 정보

본문

끝없이 펼치진 동해바다 저 멀리 수평선 너머로 찬란한 해가 떠오르면, 붉게 물들기 시작하던 바다는 햇빛에 반짝이다 이내 파란색으로 보인다. 빛을 통해 세상을 바라보도록 진화한 인간은 파란색 바다의 아래를 볼 수 없다. 전자기파의 일종인 빛은 바닷물에 흡수·산란되어 버려 우리 눈으로 되돌아오는 빛은 바닷물에 반사된 파란색뿐이기 때문이다. 이는 전자기파를 이용하는 다른 관측 장비도 마찬가지다. 광학카메라, 레이더, 라이더 등은 공기 중에서 아주 유용하지만 바닷속 깊은 곳을 촬영할 수 없다. 라디오, 와이파이, LTE 등을 이용하는 통신 장치도 바닷속에서는 무용지물이다. 바닷물을 지나는 전자기파는 감쇄와 산란으로 멀리 나아가지 못한다. 그래서 대양을 이동하는 고래는 빛 외에 소리를 이용하여 바닷속을 보도록 진화했다. 고래가 바닷속의 다른 동물이나 물체들을 어떤 모양으로 보는지는 알 수 없으나 우리가 소나를 이용해서 보는 것과 크게 다르지는 않을 것이다.
빛을 통해 사물을 보는 것에 익숙해져 있는 우리는 소리를 통해 보는 것이 자연스럽지 못하고 불편하다. 선명하고 다양한 색상으로 바닷속을 보고 싶다는 인간의 욕망은 ROV(Remotely Operated Vehicle, 원격조종 무인 잠수정)를 만들었다. 1953년 미국에서 실험용으로 처음 만들어진 ROV는 1960년대에 실용화되었다. 미 해군이 개발한 CURV-1은 1966년 미국 공군 B52기가 충돌사고로 지중해에 떨어뜨린 수소폭탄을 수심 868m의 해저에서 회수했다. ROV는 바닷속으로 들어가 빛이 전파되는 거리까지 가까이 접근해서 영상을 촬영한다. 맑은 물에서는 10m~20m까지 볼 수 있고 2~3m 이내로 접근하면 아주 선명한 영상을 얻을 수 있다. 촬영한 영상은 케이블을 통해 전송되어 바다 위에서 실시간으로 생생하게 볼 수 있다. 케이블로 통신하므로 통신의 제약이 적어 여러 대의 광학 카메라 영상과 소나 영상을 전송할 수 있고 로봇팔을 원격으로 조종하기도 한다. 케이블을 통해 전원을 공급하므로 수중에 머물 수 있는 시간에 대한 제약도 거의 없다. 혼자 들고 다닐 수 있는 작은 ROV부터 수십 톤에 이르는 중작업용 ROV까지 그 종류도 다양하다. 잠수 수심도 20미터에서 10,000미터에 이르기까지 다양하다. 현재, ROV는 과학조사, 구난, 군용 등 다양하게 이용되고 있지만 가장 큰 시장은 역시 석유·가스 산업이다.
ROV는 해저의 모습을 전해 주는 편리한 도구이지만 불편한 점이 없는 것도 아니다. 바로 케이블 때문이다. 케이블은 ROV가 수중을 다니는 동안 늘 끌고 다녀야 해서 ROV가 자유롭게 움직이는 것을 방해한다. 특히 조류 등으로 유속이 있는 지역에서는 물에 떠밀리는 케이블에 ROV가 버티지 못하고 끌려가기 일쑤다. 또한 케이블이 해저 물체에 엉기거나, 꼬여서 끊어지기라도 하는 날에는 소중한 ROV를 잃어버리기도 한다. 케이블은 ROV에게 그야말로 탯줄인 셈이다. 심해용 ROV의 경우 케이블의 길이가 수천 미터에 이르므로 케이블의 부피도 엄청나다. 지름이 수 미터에 달하는 케이블 드럼과 윈치를 실을 수 있는 크고 비싼 배가 필요해 고가의 운용비용이 필요하다는 의미이다.
우리나라 선박해양플랜트연구소에서는 6,000m까지 탐사할 수 있는 과학조사용 ROV 해미래를 2006년에 개발했다. 지름이 비교적 가는 17mm이고 길이가 8,500m인 케이블을 사용할 수 있도록 설계하여 1,450톤의 비교적 작은 조사선인 온누리호를 모선으로 하여 우리나라 동해와 태평양 해저를 탐사할 수 있었다. 이런 ROV는 특정 해역을 정밀하게 조사하거나 로봇팔로 작업하는 경우에 매우 유용한 반면, 케이블로 인해 넓은 영역을 자유롭게 움직이지 못하는 한계가 있다.
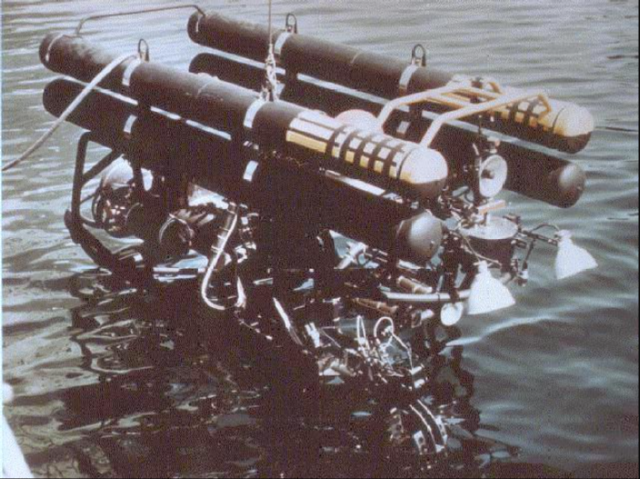
최초로 실용화된 ROV 미해군의 CURV-1 ⓒFederation of America Scientists

6,000m급 심해 ROV 해미래 ⓒ선박해양플랜드연구소
이런 ROV의 단점은 AUV (Autonomous Underwater Vehicle, 자율무인잠수정)를 개발하는 계기가 됐다. 미국 워싱턴대학의 응용물리연구소에서는 1967년에 SPURV (Special Purpose Underwater Research Vehicle) 1호기를 제작하였는데 이것이 AUV 연구의 출발선이었다. AUV는 이름 그대로 원격조종 대신 스스로 이동하며 해저를 조사하는 잠수정이다. 모선과 연결된 케이블이 없어 아주 멀리까지 자유롭게 비교적 빠른 속도로 이동하면서 데이터를 수집할 수 있다. 각종 해양학 데이터와 함께 소나를 이용해서 해저 지형 데이터를 주로 수집하지만, 카메라로 광학 영상을 촬영하기도 한다. 100~200미터 수심까지 잠수하며 비교적 천해역의 해저를 조사하는 소형 AUV에서부터 수천 미터까지 잠수하는 대형 AUV까지 종류와 크기도 다양하다. AUV는 은닉성이 높아 군사용으로 개발이 활발하다. 최근에는 대형급 또는 초대형급 군용 AUV를 선보이고 있으며 이들은 수개월 동안 수중에서 단독으로 임무를 수행하기도 한다.
우리나라에서는 1998년 러시아 기술을 도입해 당시 대우조선해양(주)에서 옥포6000 AUV를 국내 처음 개발하였고, 선박해양플랜트연구소에서는 국내 기술로 1999년에 보람AUV, 2009년에 이심이100 AUV를 개발하였다. 최근에는 해양 수색용 AUV와 기뢰탐색용 AUV가 해양경찰청과 방사청 지원으로 각각 개발 진행되고 있다. AUV는 모선과 연결된 케이블이 없어 움직임이 자유롭지만 스스로 작업을 수행해야 하기 때문에 자율 제어 장치와 전원을 자체 내장하고 주변 환경의 변화를 인식하고 판단·대응해야 한다. 장애물을 만날 경우, 이를 인식하고 어떻게 피해 갈지 행동을 결정해야 하며, 탑재 장비가 고장 났을 경우, 임무를 계속 수행할지 아니면 중단하고 돌아갈지를 판단해야 한다. 수중에서 어떤 목표물을 찾는 임무를 수행할 경우, 수중에서 감지되는 물체 중 목표물일 가능성이 높은 물체들을 구분하고 재방문해서 목표물 여부를 확인해야 할 수도 있다. AUV의 자율화 수준은 사람의 개입 정도에 따라 5단계 또는 10단계로 나누고 있지만, 임무 복잡도가 높을수록 자율화의 수준도 높아야 하고, 자율화 수준이 높을수록 시스템의 복잡도도 높아진다. 조작자의 예측에 의한 사전 프로그램에 따라 작동하던 AUV가 최근에는 인공지능 기술의 발달로 자율화 수준을 극적으로 향상시키고 있다.
ROV와 AUV 두 기능의 장점들을 활용하려는 시도도 있다. 전원을 내장하고 통신만 케이블을 이용하는 HROV(Hybrid ROV)는 낚싯줄처럼 가는 광통신 케이블을 이용하여 케이블의 단점을 최소화하면서 통신의 제약을 극복한다. 빛이 전혀 없는 심해에서는 빛을 이용한 무선 광통신 장치를 이용하여 ROV를 무선으로 제어하려는 시도도 있다. 무선 광통신 장치는 약 100m의 거리에서 1Mbps 이상의 데이터 전송이 가능한 정도이다. 또한 AUV의 자율 인식 및 제어 기술을 ROV에 적용하여 ROV의 자율화 수준을 높여 조작자가 더 쉽게 조종할 수 있도록 하기도 한다. 그러나 이들은 ROV와 AUV의 기능과 장점을 100% 발휘하지는 못한다. 따라서, ROV와 AUV는 서로를 대체하는 대신 각각의 고유 기능과 역할을 지속해서 유지·확대해 나가게 될 것이다. 지구 온난화로 인한 기후 위기, 해저 열수의 화학합성 생태계 등 해양과학 조사와 해저 열수광상, 망간단괴, 망간각 등 국가 전략 자원에 대한 관심은 날로 증가하고 있다. 심해로 내려갈 수 없는 인류는 ROV와 AUV가 더 많이 필요할 수밖에 없다. 세계 ROV 시장 규모는 2030년에 1억 7,507만 달러로 예측되고, 세계 AUV 시장 규모는 2028년에 49억 달러에 달할 것으로 예상된다. 삼면이 바다로 둘러싸여 해양강국을 꿈꾸는 우리나라가 진정한 해양강국이 되기 위해서는 조선기술과 함께 해저로 내려가는 ROV와 AUV 기술에 더욱 관심을 가져야만 하는 이유다.

6,000m급 심해 ROV 해미래 ⓒ선박해양플랜드연구소
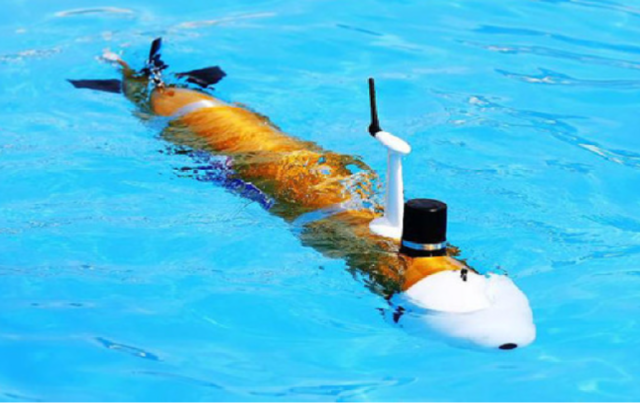
자율무인잠수정 이심이100 ⓒ선박해양플랜드연구소
재구성: 「잠수정의 세계」, 우라 타마키, 타카가와 신이치 편저, 김웅서, 박준성, 이판묵, 최영호, 박찬홍, 김동성, 정회수 역
재구성: 「수중드론이라 불리는 자율 무인 잠수정」, 우종식, 김준영, 문재운, 서주노, 성우제, 유선철, 전봉환, 최형식 지음
Autonomous Underwater Vehicle (AUV) Market by Shape (Torpedo, Laminar Flow Body, Streamlined Rectangular Style, Multi-hull Vehicle), Type (Shallow, Medium, & Large AUVs), Technology (Imaging, Navigation, Propulsion), Payload - Global Forecast to 2028
https://www.giikorea.co.kr/report/mama1305949-autonomous-underwater-vehicle-auv-market-by-shape.htm
ROV Market Size & Share Analysis - Growth Trends & Forecasts (2024 – 2029)
https://www.mordorintelligence.com/industry-reports/rov-market
http://www.navaldrones.com/SPURV.html
https://irp.fas.org/program/collect/curv1.jpg


전봉환
선박해양플랜트연구소 책임연구원
1996년부터 선박해양플랜트연구소에서 ROV와 AUV를 개발해 오고 있으며,
해미래ROV, 보람AUV, 이심이AUV, 수중보행로봇 크랩스터 등 개발에 참여하였고,
현재 무인이동체사업단 해양복합연구단장, 해군발전자문위원, 한국해양공학회 학술이사 등으로 활동하고 있다.